2017年10月03日
2017年10月3日に幕張メッセ国際会議場で開催された「ICTイノベーションフォーラム2017」で自律型モビリティシステムの平成28年度研究開発・成果の紹介を行いました。
平成28年度の研究成果の概要(当日発表資料)は、以下の通りです。
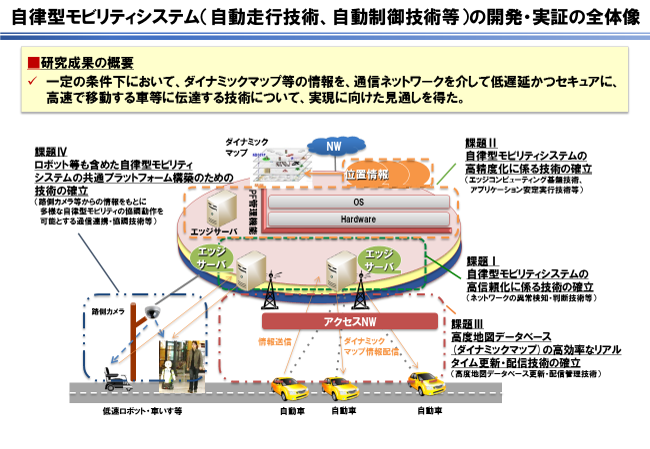
研究開発の全体像
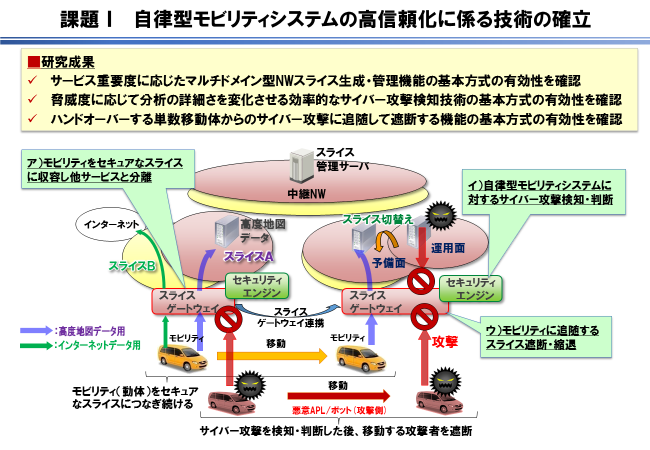
課題Ⅰ:自律型モビリティシステムの高信頼化に係る技術の確立
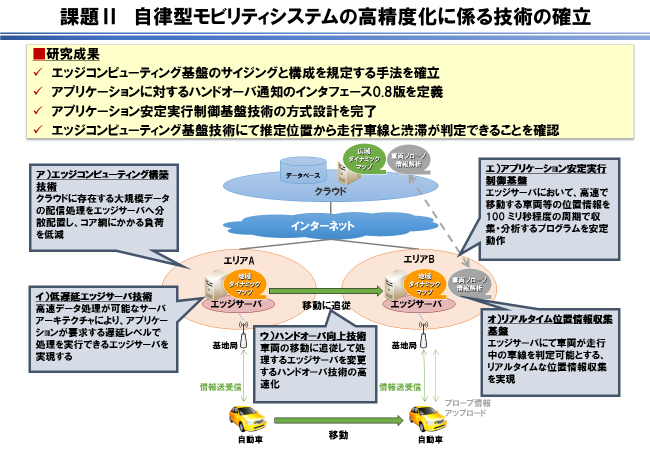
課題Ⅱ:自律型モビリティシステムの高精度化に係る技術の確立
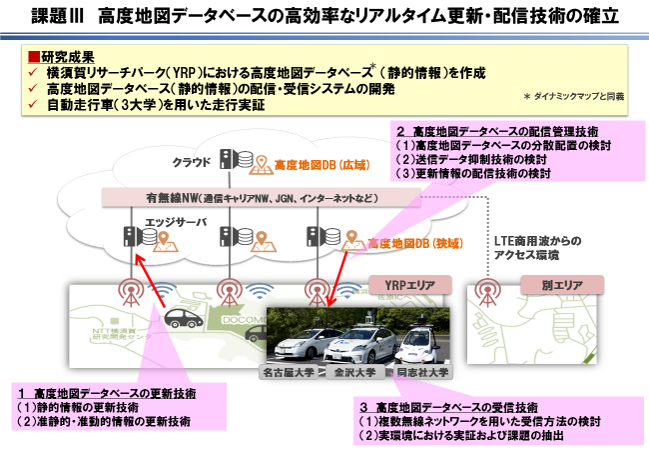
課題Ⅲ:高度地図データベースの高効率なリアルタイム更新・配信技術の確立
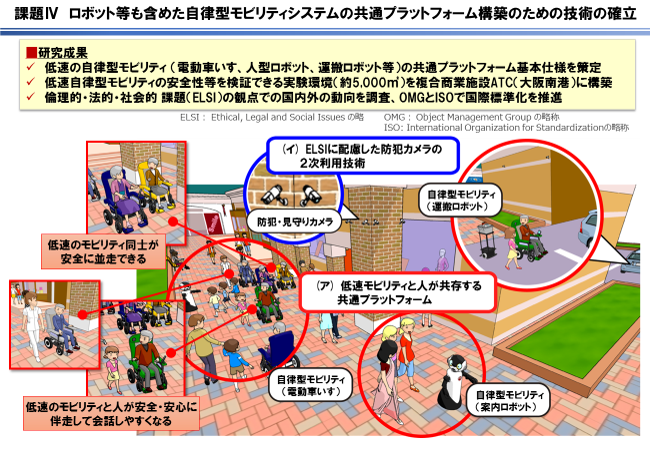
課題Ⅳ:ロボット等も含めた自律型モビリティシステムの共通プラットフォーム構築のための技術の確立